
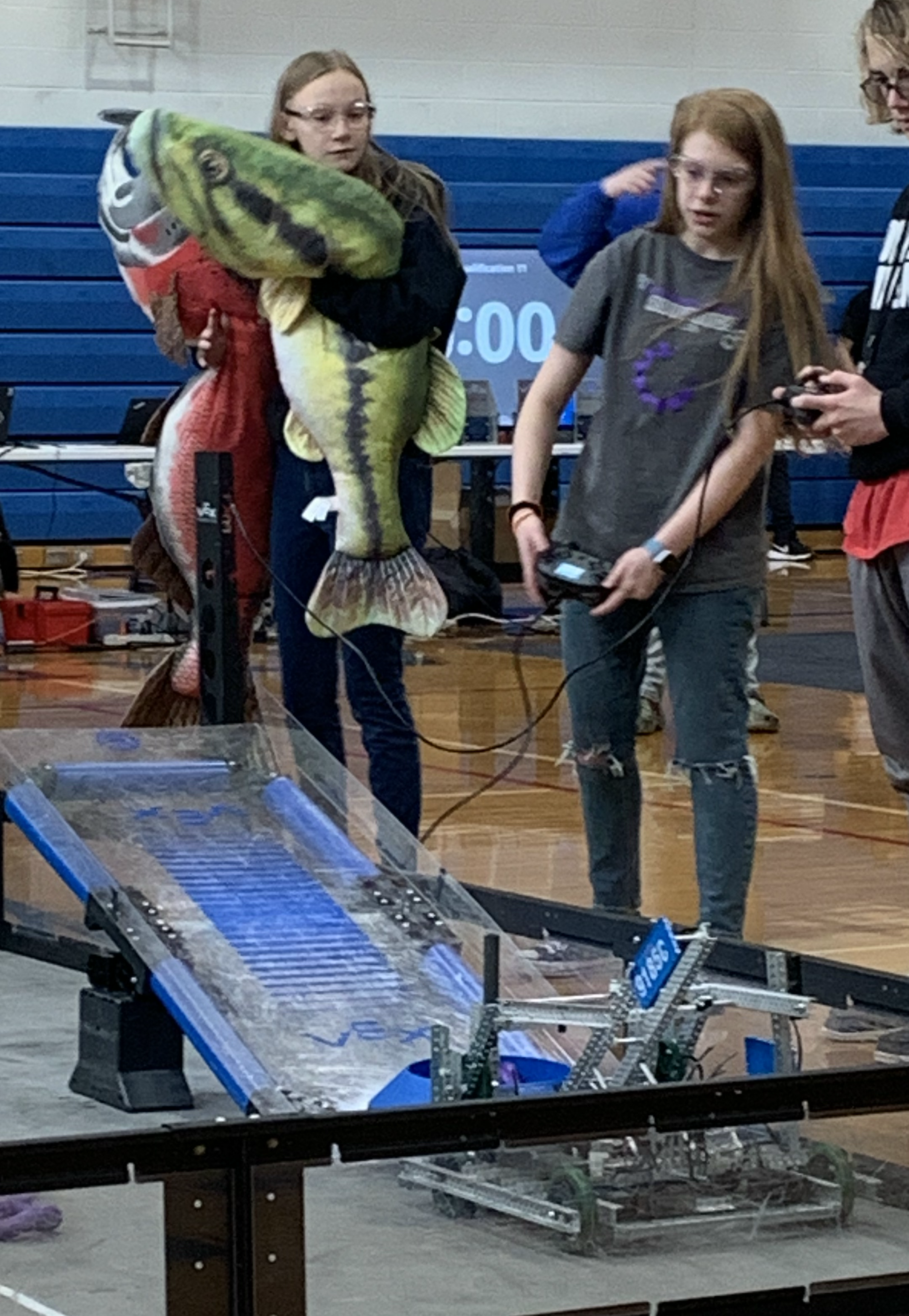
Samantha Smith (Builder, Programmer, Driver) and Molly Woodlief (Builder)
Team 14760A started from the first day of school to make the best robot possible, and they hope to qualify for states! There were multiple redesigns throughout the year, usually after each competition. No component on Jared has stayed the same from the start, and many hours were put into him to change those components.
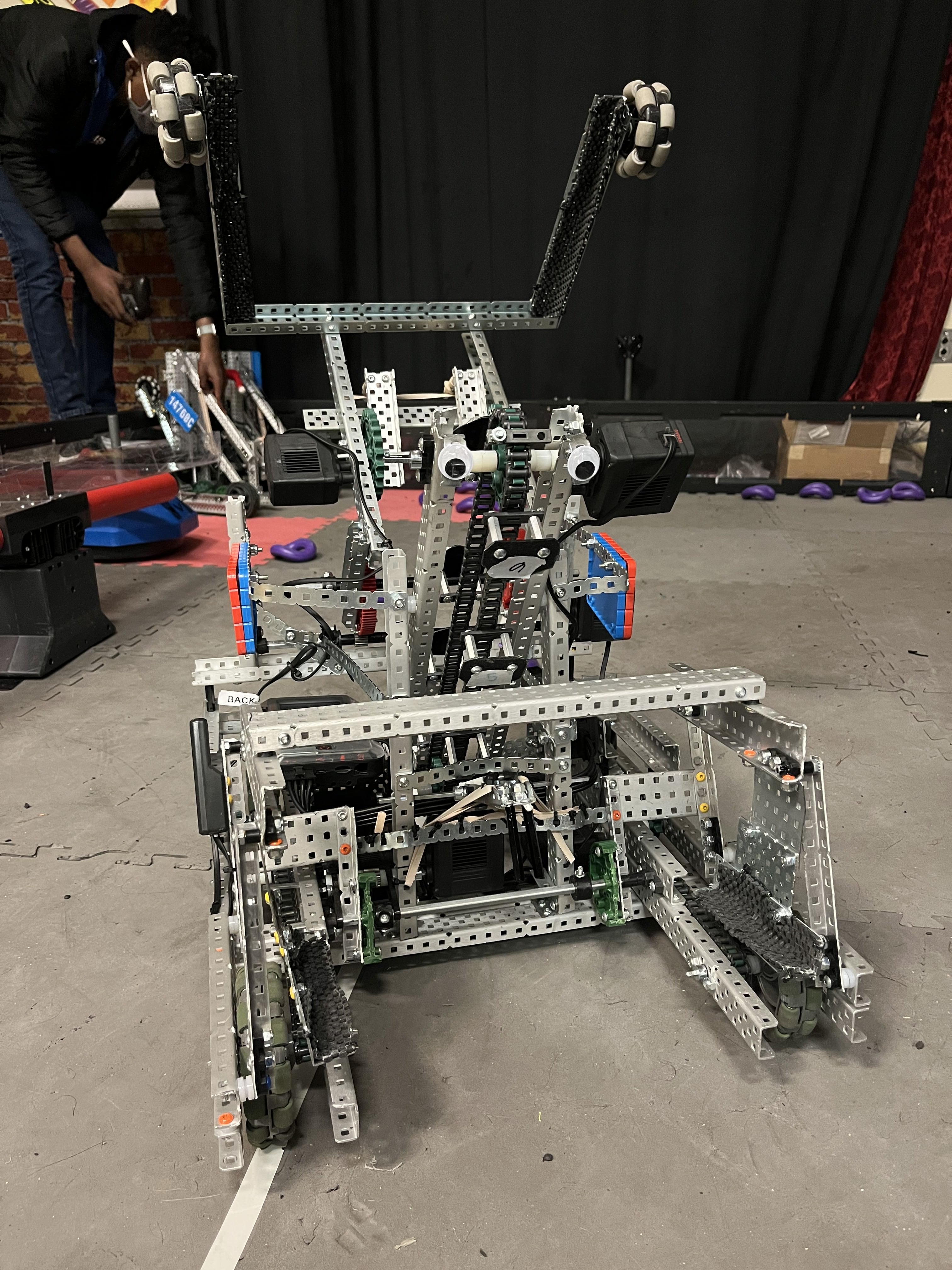
Jared's original design included a front lift to grab the towers, and a back lift for getting towers and lowering the balance. He also had an intake system that allowed rings to be sucked in and distributed onto the pole of the small towers. The ring intakes were not consistent, and was causing issues with getting up the balance, so these were later reworked.
For Jared's final design the intake system was completely scrapped, allowing him to carry 3 towers onto the balance, because that was worth more points and aligned better with the driver's strategy. Because of the added weight, the team had to switch the drive motors to high-torque, to give him enough power to park. Though he may be slower, the team has a lot of hope for this strategy. Additonally, many pieces of plastic were added to the base to prevent Jared from getting stuck on rings.
Jared's programming is now on version 6, and has had a significant number of major changes along the way. His automomous is very consistent, and is able to do both sides and score a win point. The original automomous for the left side win point has stayed the same since the beginning, because of how successful it was, but the other codes have changed a lot. With the reduced speed from the high torque motors, the team decided to go for the middle tower, though it is harder to get, because most teams don't go for it, so they wouldn't have to worry about beating another team to that tower.


PHSN Robotics Member 2018-2022